Realistic and Interactive Robot Gaze

Description
This work describes the development of a system for lifelike gaze in human-robot interactions using a humanoid animatronic bust. Previous work examining mutual gaze between robots and humans has focused on technical implementation. We present a general architecture that seeks not only to create gaze interactions from a technological standpoint, but also through the lens of character animation where the fidelity and believability of motion is paramount; that is, we seek to create an interaction which demonstrates the illusion of life. A complete system is described that perceives persons in the environment, identifies persons-of-interest based on salient actions, selects an appropriate gaze behavior, and executes high fidelity motions to respond to the stimuli. We use mechanisms that mimic motor and attention behaviors analogous to those observed in biological systems including attention habituation, saccades, and differences in motion bandwidth for actuators. Additionally, a subsumption architecture allows layering of simple motor movements to create increasingly complex behaviors which are able to interactively and realistically react to salient stimuli in the environment through subsuming lower levels of behavior. The result of this system is an interactive human-animatronic experience capable of human-like gaze behaviors.
Media Coverage
The Late Show with Stephen Colbert
IEEE Spectrum
Digital Trends
Gizmodo
Engadget
Boing Boing
The Orange County Register
In the Magic
Manuscript
Presentation Venue
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020
Las Vegas, USA
Nonparametric Motion Retargeting for Humanoid Robots on Shared Latent Space
Description
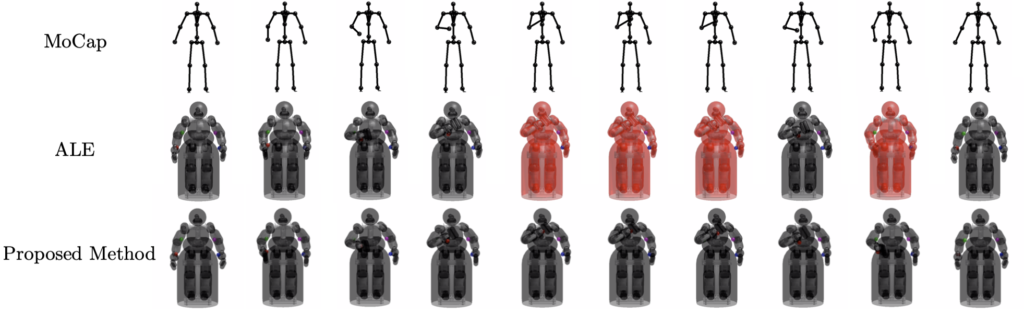
In this work, we present a semi-supervised learning method to transfer human motion data to humanoid robots with varying kinematic configurations while avoiding self-collisions.To this end, we propose a data-driven motion retargeting named locally weighted latent learning which possesses the benefits of both nonparametric regression and deep latent variable modeling. The method can leverage both paired and domain-specific datasets and can maintain robot motion feasibility owing to the nonparametric regression and graph-based heuristics it uses. The proposed method is evaluated using two different humanoid robots, the Robotis ThorMang and COMAN, in simulation environments with diverse motion capture datasets. Furthermore, online puppeteering of a real humanoid robot is implemented.
Manuscript
Presentation Venue
Robotics Science and Systems (RSS) 2020
Virtual Presentation
Additional Media
Fast Handovers with a Robot Character: Small Sensorimotor Delays Improve Perceived Qualities

Description
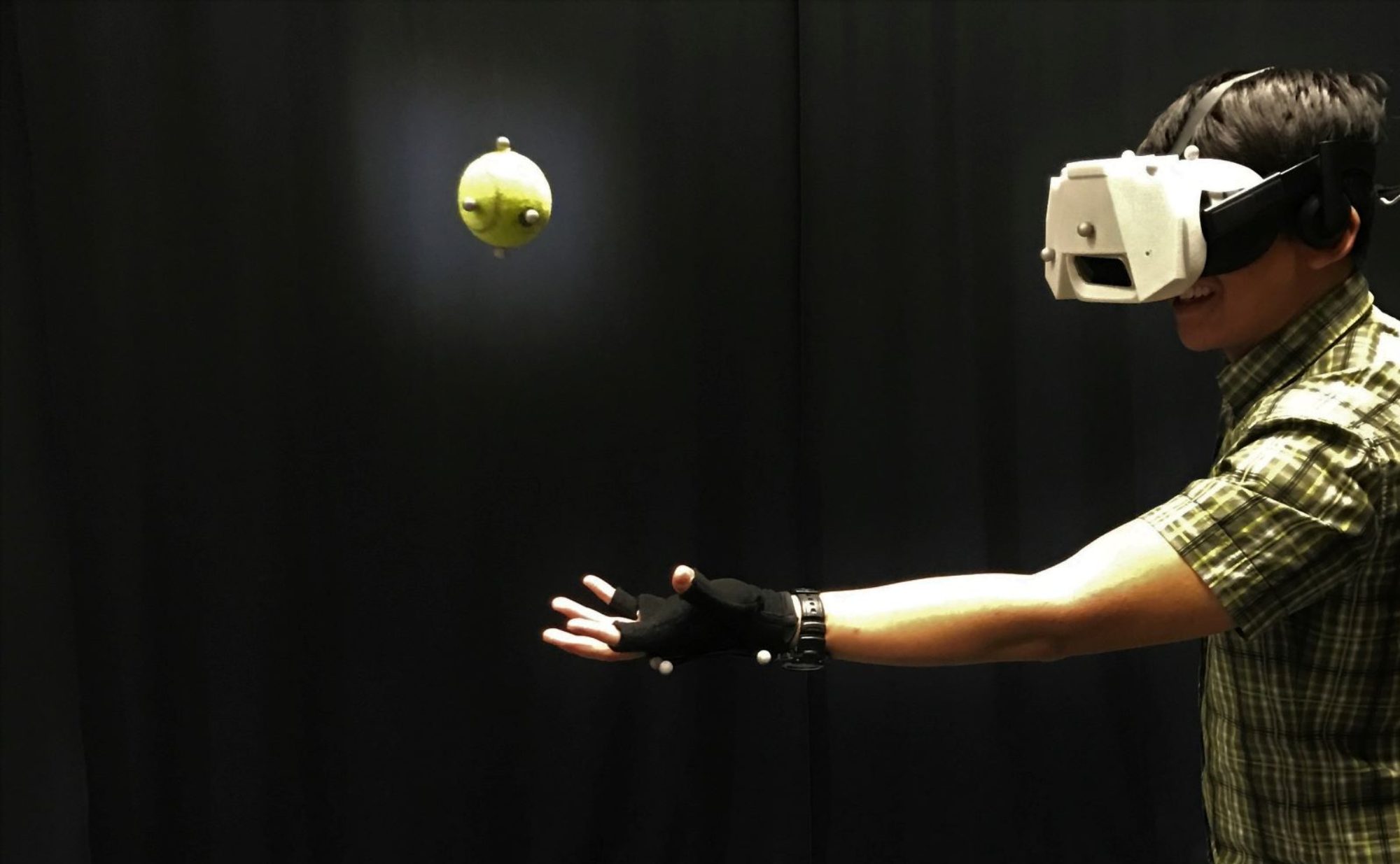
We present a system for fast and robust handovers with a robot character, together with a user study investigating the effect of robot speed and reaction time on perceived interaction quality. The system can match and exceed human speeds and confirms that users prefer human-level timing.
The system has the appearance of a robot character, with a bear-like head and a soft anthropomorphic hand and uses Bezier curves to achieve smooth minimum-jerk motions. Fast timing is enabled by low latency motion capture and real-time trajectory generation: the robot initially moves towards an expected handover location and the trajectory is updated on-the-fly to converge smoothly to the actual handover location. A hybrid automaton provides robustness to failure and unexpected human actions.
In a 3×3 user study, we vary the speed of the robot and add variable sensorimotor delays. We evaluate the social perception of the robot using the Robot Social Attribute Scale (RoSAS). Inclusion of a small delay, mimicking the delay of the human sensorimotor system, leads to an improvement in perceived qualities over both no delay and long delay conditions. Specifically, with no delay the robot is perceived as more discomforting and with a long delay, it is perceived as less warm.
Manuscript
Presentation Venue
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2019
Macau, China
Media Coverage
TechCrunch